3D Robotcis(3DR)は元々、当時Wiredの編集長だったChris Andersonが始めた、ドローン自作を趣味とする人達のコミュニティ、DIYDrones.comから生まれた会社です。Chris Andersonが自分の子供と一緒にプログラム可能なレゴを使って、自作のドローンを組み立てたことがきっかけとなり、趣味が講じてDIYDrones.comを立ち上げたところ、たまたまコミュニティにいたJordi Muñozという19歳のメキシコ人学生がWiiリモコンの加速度センサーを使ってフライトコントローラーを作ってしまいます。
ちなみに、このWiiリモコンは当時としては珍しかった、Bluetooth接続で手軽に加速度センサーで遊べるガジェットだったので、私もバーチャルライトセーバープログラムを書いて遊んだ記憶があります。
その後、ChrisとJordiが3DRを立ち上げ、16MHz、8ビットのArduinoをベースにした初代ArduPilot(ハード)や、より性能の上がったAPM(ArduPilot Mega)やAPM2といったDIY向けのフライトコントローラーに発展してゆきます。初代APM系のボードは、Autonomous Vehicle Competitionという自立制御乗り物のコンテストを開催していた電子部品販売大手のSparkfunが製造を担当していました。当然、Arduinoボード用に書かれたファームウェアであるArduPilot(ソフト)は、Arduinoのスケッチとして実装されていました。
その一方で、PX4/Pixhawkプロジェクトは、ドローン制御の最先端をゆく、スイス工科大学チューリッヒ校(ETH Zurich)で、オープンソースハードウエア&オープンソースソフトウェアの32bitフライトコントローラーを作る目的で始まりました。
そのPixhawkの製造パートナーに3DRが選ばれ、ArduPilotプロジェクトとPX4プロジェクトが共同で、どちらのソフトウェアにも対応したハードウェアとして、Pixhawkが誕生しました。3D Roboticsは、初期段階からPixhawkの生産、販売と、ArduPilot系開発者への金銭的支援を熱心に行っていたため、3DR独自の製品だと勘違いされることが多いですが、PX4/Pixhawkの出処はETH Zurichで、ArduPilotの出処はDIYDrones.comです。
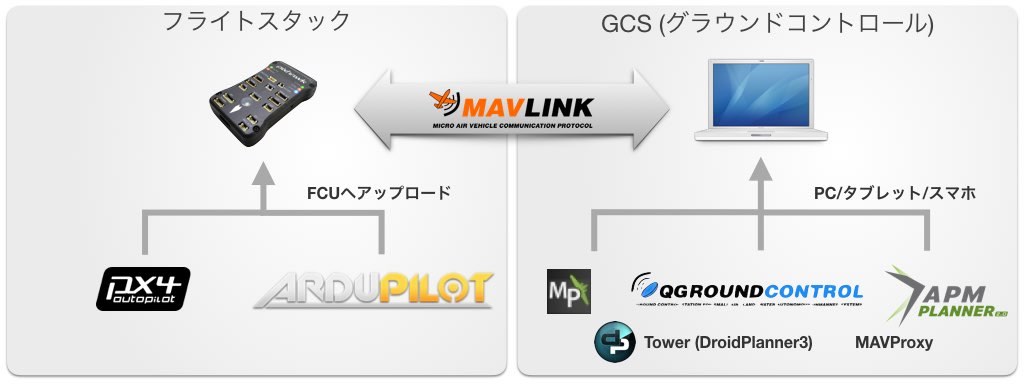
ちなみに、PX4もArduPilotも、元来ハードとソフトがセットになったプロジェクトだったのが、いつの間にかハードとソフトが独立して進化してしまったため、PX4、ArduPilot共にハードウェアとソフトウェア両方が存在し、名前だけではどちらの話なのか不明で、非常にややこしいです。Zenbotでは、PX4(ソフト)、PX4(ハード)、ArduPilot(ソフト)、ArduPilot(ハード)というふうに識別しています。
PX4/Pixhawk/ArduPilotプロジェクトが特徴的なのは、ソフトウェアだけでなく、ハードウェアも多くがオープンソースであることです。比較的安価なのに高性能で、技術力さえあれば自由に拡張できるため、今ではPixhawk系のフライトコントローラーを載せたドローンは、全世界で100万機も飛んでいると言われています。勿論、Zenbotも始めからPixhawk系のコントローラーのみを採用しています。
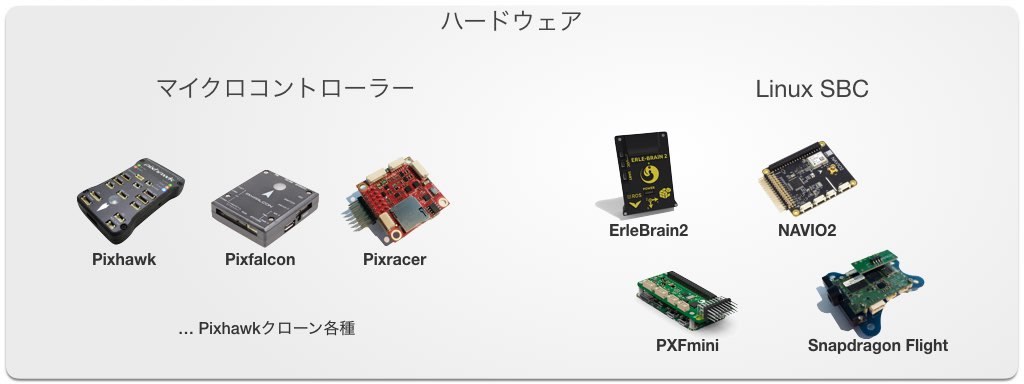
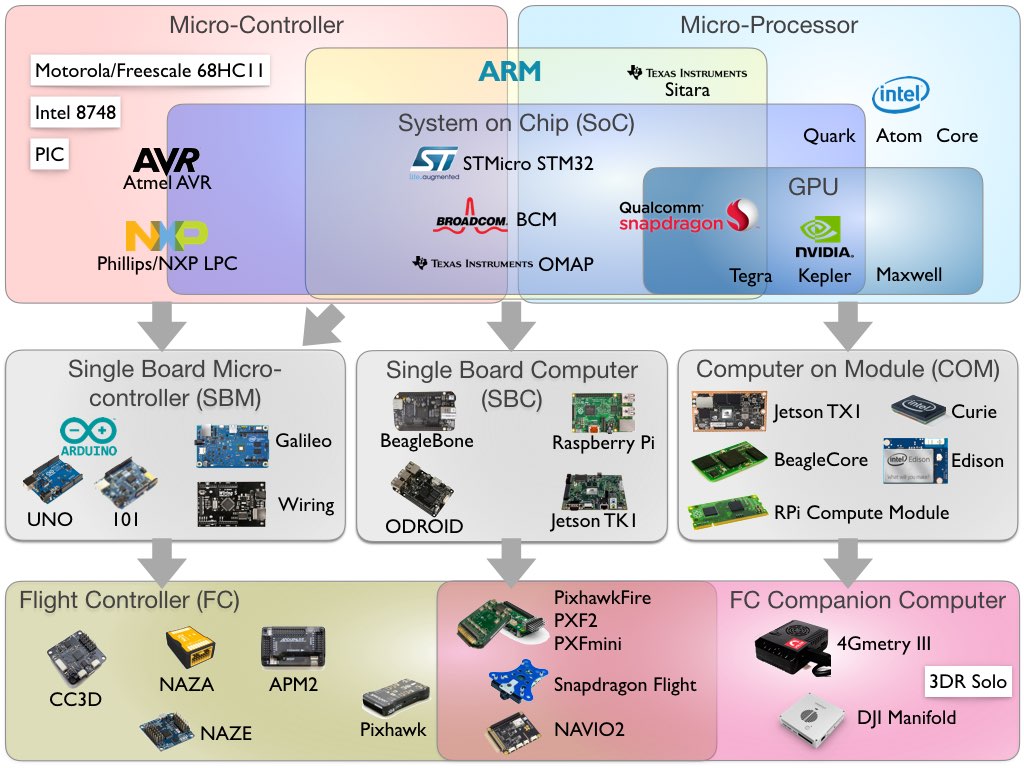
ハードウェアもオープンソースであるため、当初はマイクロコントローラーベースだったハードウェアも、いまやLinuxシングルボードコンピューターを含む様々な製品が出てきており、PX4(ソフト)も、ArduPilot(ソフト)も、非常に多くのプラットフォームに対応しています。
このように、DIY向け、玄人向けの製品を製造、販売することで有名になった3DRですが、同じようにDIY向けの製品を作っていたDJIが、空撮専用のドローンをコンシューマー向けに販売することで成功したのをみて、我らも遅れまじと、それまでの忠実な顧客ベースだったDIYユーザーをあっさりと切り捨て、コンシューマー市場に参入しようとして見事に撃沈したのはご周知の通りかと思います。
ドローンバブルに乗って、最初から100億円レベルの資金を集めてしまうと、期待値もあがってしまい、市場が熟成していないうちに過度な売上目標を設定してしまうことになり、結局は既存顧客や自社の強みを無視した無理な先行投資と製品開発に突き進んで失敗し、大幅な軌道修正からの事業縮小、大量解雇、という典型的な敗戦処理パターンに陥った3DRですが、その後は、DJIファントムの対抗馬としてコンシューマー向け空撮ドローン市場に鳴り物入りで参入した自社製品、Soloの単体販売を早々に諦め、Site Scanという測量用の業務ソリューションとの抱き合わせ販売に特化するべく大きく舵をきりましたが、売上は今ひとつのようです。
過大な増資は経営リスクでしか無いので、資金集めは必要最小限に留める、というのはベンチャー経営者の鉄則だと思いますが、膨大なお金に目が眩んでしまったのかもしれません。まるでドットコムバブルの再来のようなドローン業界ですが、それでも3DRは4月のシリーズDラウンドで$53Mの追加増資を行っていますので、まだまだ業界としての期待値は高いということでしょうか。
で、ようやく本題ですが、そんな3DRも、ついにSite ScanサービスでDJI機の対応を発表しました。
https://3dr.com/blog/3dr-dji-enterprise-atlas/
ハードに関しては完全に白旗、というのは明白でしたし、3Dソフトウェア最大手のAutoDeskと測量関連で提携しているので、今3DRに潰れてもらっては困る、というのはわかりますが、DJI機でできることをやっても差別化要因がなく、先行するPix4D等に対抗できるとも思えず、余計に自分の首を締めることになるだけのような気がするのは、私だけでしょうか。。。
余談ですが、Chris Andersonと共に3DRを立ち上げたメキシコ人学生のJordi Muñozは、既に3DRを離れ、mRoboticsという会社を立ち上げています。mRoboticsは、3DRの製造設備を引き継ぎ、原点に立ち返ってDIYユーザー向けに高品質なPixhawkや後継機を製造・販売しています。この点、HobbyKing製の安物クローンに自社ロゴを貼り付けて販売している3DRとは対象的で、ユーザー視点で改良を続け、商品ラインナップや入手性などにも気を配って活動しているのは非常に好感が持てます。